The system under consideration is an improved version of the one described in chapter 5 of The direct midpoint method as a quantum mechanical integrator ('the article' for short). It is certainly a good idea to look through the article before reading the following. We take the geometry, sizes, and physical parameters from the system of the article. However, we allow for an enlargement of street 1 (the 'biotope' of particle 1) by equal pieces on both sides of the crossing. For the computer run which created video 2, to the native 150 discrete positions, on each end of street 1 there were added 587 positions (no change in the gap between neighbors). Also the range in model time was extended from 2.115 to 9.8. Numbers for physical quantities always refer to a system of units in which h-bar and c have the numerical value 1. The crossing street 2 (biotope of particle 2) has 64 discrete positions (as in the article, of course).
A remark on the relation between this discrete space and a graphical representation of wave function may be in order. The center of the graphical window always coincides with the crossing point of streets 1 and 2. In the context of graphics we speak of the discrete positions as 'pixels' although this is not correct from a technical point of view: Actually our pixels are small rectangular areas which, in our present case, result from dissecting the rectangular screen window into a matrix of 1324 columns and 64 rows for video 2. These are the numbers of columns for the other videos: (video 1: 440, video 3: 196, video 4 150). Each 'pixel' is capable of emitting light such that the perceived color can be understood as a code for a complex numbers. A complex valued function on the rectangular screen window corresponds to a wave function in our model only if it is constant over every 'pixel'. On a real computer display (such as a LCD screen) each 'pixel' may be formed by many true pixels, and the boarders between 'pixels' may be smeared out by interpolation.
Further, there are a few technical points in which the present computer runs differ from the one in the article:
1. In the present video the ends of street 1 are of reflecting nature and not of a nature that enforces periodic boundary conditions.
2. The graphical gamma is always smaller than the value 0.5 used in ther Figures of the article. This lets small brightness variations in the video frame correspond to large factors for the wave function. Although the part of the wave function left of the central white bar, the back-scattered part of the wave function, looks nearly as large as transmitted one, the probability for back-scattering is only about 20%.
3. The integrator is not the one of the article but the DALF-integrator, which was not yet invented when the article was written. Both integrators have the same critical timestep and both are reversible.
4. The interaction potential between the two particles has finite range and this range is shown in the graphics by faint vertical lines on both sides of the origin. The thick white line through the origin marks street 2. At the left side of this triplets of vertical lines we see a 'line the central part of which is missing'. This marks the place where initially particle 1 had its largest probability of presence. Such marks are missing in the Figures of the article.
Let us reflect on the role of space discretization and time discretization of our
simulation.
Using the notation of the article, each integration step yields a system
ψij of complex numbers which is a discrete version of a 2-particle
wave function, where each particle moves along a discretized 1-dimensional space.
Of course, it also yields the time t for which ψ is valid.
In the idealized situation that particle detectors are placed
at positions i and j, the probability for both detectors to fire at time t
is |ψij|2.
As a second idealization, we assume
that we can exactly repeat arbitrarily often an experiment starting from identical
initial states (e.g. non-degenerate ground states as in the system considered here,
no problem with the no cloning theorem!).
Then in principle we can determine all
values |ψij|2 but we never can determine
the relative phase of any two ψ-values belonging to different positions or times.
This is in stark contrast to the capabilities of the simulation which finds all
ψ-values for all positions and times that are represented by the model under
consideration.
There is an other interesting class of objects which the simulation allows to define and to
study, although they are not amenable to measurement.
For any i we may consider the system (ψij)j
which, after normalization, is a wave function of particle 2.
Correspondingly, for any j the system (ψij)i determines
a wave function of particle 1.
These objects can't be constructed from measurable data (even under the strong assumptions made above),
while they are natural and instructive spin-offs of the simulated 2-particle wave function.
Here is an example for the kind of reasoning enabled by these objects: For further consideration we
select a video-frame (showing the situation for time T) and a pixel P on the row of pixels
which form the x-axis of the graphics.
There is a column of pixels containing P.
The color-values of pixels of the column have the mathematical structure of a wave function W of
particle 2.
What is the meaning of this 'wave function' which we better should refer to as a 'relational wave function'.
There is no other plausible possibility beside this one:
W contains all information on measurements bearing on particle 2 at time T if we
know that particle 1 was just detected at P. If, in addition, P is farther away from the crossing point than the
interaction range of the particles the time evolution of W is determined by the Hamiltonian of
particle 2 alone and thus W contains all information on measurements bearing on particle 2 at times
equal or larger than T.
Inspecting the relational wave function at different places on the x-axis we find it to have knots in some places
and to look very much the same as in the initial state in others.
We observe: If particle 1 was detected as far to the right as possible, a instantaneous detection of
particle 2 would be consistent with the hypothesis that it was in the ground state.
More generally we see that the two-particle state is an entangled one in which energy loss of particle 1
and excitation (seen as knots in the wave function) of particle 2 are correlated.
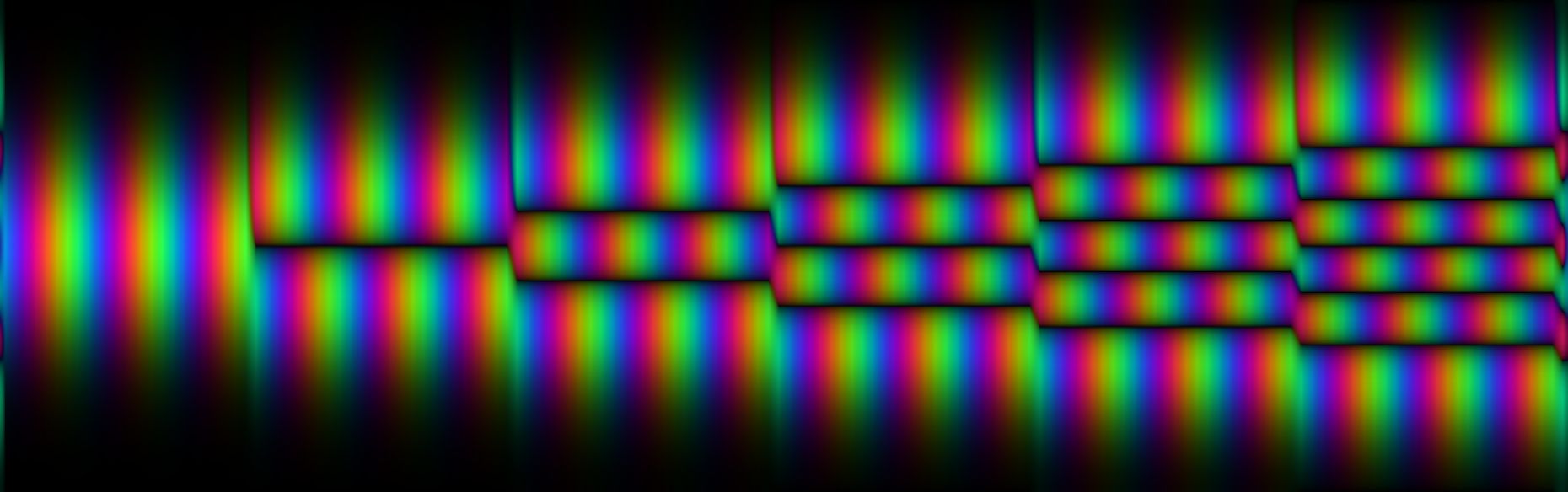
If the relational wave function is an eigen-function (of the Hamiltonian of particle 2) it is one of the types
shown here . The colorful strips come from a periodic wave
function of particle 1 by which the eigen-functions of particle 2 are multiplied. From left to write we have
the ground state followed by the first, second,... excitation. Notice that odd excitations have a not 'in the middle'
(i.e. on the x-axis).
Due to parity conservation of the interaction these levels never get excited.
The everchanging patterns to be observed in the time evolution of the 2-particle wave function result from the fact
that the relational wave functions more often than not are linear combinations of two or more eigen functions.
The coefficients (that could easily be computed as part of the simulation) show rapidly changing phases and
absolute values which only change due to interaction between the two particles.
Interaction obviously affects only pixels between the faint vertical lines on both sides of origin.
So, what happens outside the two lines is nearly trivial dynamically, although the visual impression suggests
otherwise.
The first video covers a range in model time of 3.1 time units and each 10th computed state is used for creating a video frame. The total computation time for creating the video frames was 773 s. (The execution time of 58.3 s, reported in the article referred to a run in which all graphical activities were disabled and for which the time range was 2.115 time units). For both videos the time step was 0.000816714 time units (vs. 0.00106798566 in the article).
Subsequent to the evolution of the two-particle wavefunction there appears a non-animated representation of the probabilities for finding particle 1 left of the crossing point (red curve) or to the right of it (green curve). We see that the probability of finding the particle 'scattered back' is about 20%.
The next non-animated graphics represents the same quantities as Figure 6 of the article. Nothing has to be added to the explanation given there.
The next two non-animated graphics represents the same quantities as Figure 7 of the article. The repetition of the initial transient phenomenon in Figure 7 is caused by interference of the transmitted and the back-scattered part of the wave function. Due to the toroidal topology of the biotope these meet near the end of the run. In the present simulation, no such interaction happens since the wave function stays away from the rims of the biotope. In the third video the biotope is reduced in size and at the reflecting ends of the biotope the wave function interferes with its reflected part. This produces an effect very similar to that in Figure 7.
The second video covers a time range of 9.6 time units and each 30th computed state is shown as a video frame. Apart from the graphical and time-wise range and resolution both videos show the same process. The total computation time for creating the video frames was 1700 s.
The third video shows the effect of contact of the wave function with the rim of its biotope. Here the graphical gamma is set to 0.1 so that also extremely small values of the wave function become visible.
The fourth video shows a situation in which the reflected particle is given enough time to hit particle 2 again. This has an effect on both the excitation levels and on the residual errors of norm and energy. Here the graphical gamma is set to 0.15. These computing tools were used: CPU 4.464 GHz; RAM 16 GB; OS Ubuntu; SW C++20, OpenGL, FreeGlut, Code::Blocks, ffmpeg (for video creation from ppm-files), C+- (self-made C++ library); Compiler GNU.
{kind=link}